The proposed algorithm incorporated parameterized kinematic solutions and inertial measurement unit (IMU)-fused odometry, achieving high-precision navigation with a robot error rate below five percent in both simulation and real environments.
Rescue robotics plays a vital role in disaster response, yet current designs face challenges in navigating diverse terrains and environments. Traditional wheeled and legged robots struggle with adaptability and stability, prompting the exploration of innovative designs like legged-wheeled robots. Origami-inspired structures offer promising solutions due to their folding properties and versatility.
Prior research in origami design has yielded theoretical advancements and practical applications across various fields, including robotics. However, challenges persist in the modeling and reinforcement of thin-shell structures like water-bomb origami wheels, hindering their widespread adoption in rescue robotics.
Additionally, existing SLAM and path planning algorithms are tailored for traditional robots, lacking optimization for deformable-wheeled robots. This paper addressed these challenges by proposing a simplified water-bomb wheel modeling method and designing a variable-diameter wheel with enhanced strength. By integrating multiple linkages and water-bomb structures, the novel design improved adaptability and traction in rescue robot movement.
Furthermore, the researchers presented a mapping algorithm that incorporated parameterized kinematic solutions and IMU-fused odometry for SLAM and autonomous navigation. This approach filled the gap in existing research by providing a tailored solution for deformable-wheeled robots, enabling precise navigation in complex environments. Through robot operating system (ROS)-based simulation and physical prototypes, the effectiveness of the proposed methods was demonstrated, promising advancements in rescue robotics for disaster response scenarios.
Modeling of water-bomb wheels
The modeling of water-bomb wheels, crucial for various applications, traditionally involves solving a system of equations, presenting challenges in accuracy and computational efficiency. To overcome this, a novel recursive-based modeling approach was introduced in this paper. Unlike traditional methods, the proposed approach simplified the modeling process by calculating the coordinates of an unknown point based on three known points, significantly reducing the number of equations to be solved.
By considering the axis of the wheel as the z-axis and utilizing shape parameters, the recursive method recursively calculated the three-dimensional (3D) coordinates of all points on the water-bomb wheel. Through a series of equations, the coordinates of points on both the upper and lower halves of the wheel were determined, facilitating parametric modeling. This innovative approach enhanced accuracy while reducing the computational workload, making it a promising solution for efficient water-bomb wheel modeling. Various types of water-bomb wheel models can be easily generated using this method, offering flexibility and versatility in design and application.
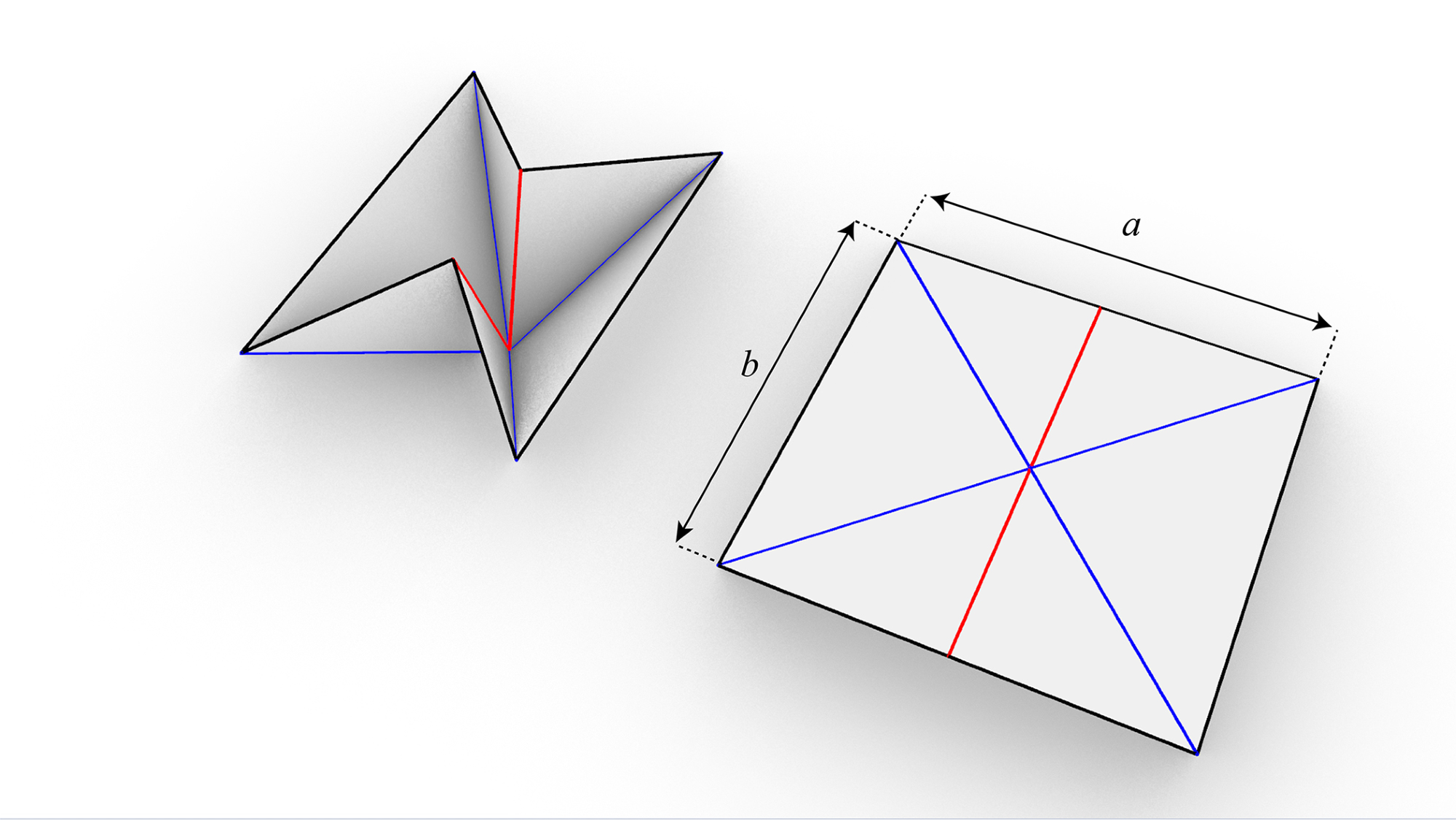 Basic unit of water-bomb.
Basic unit of water-bomb.
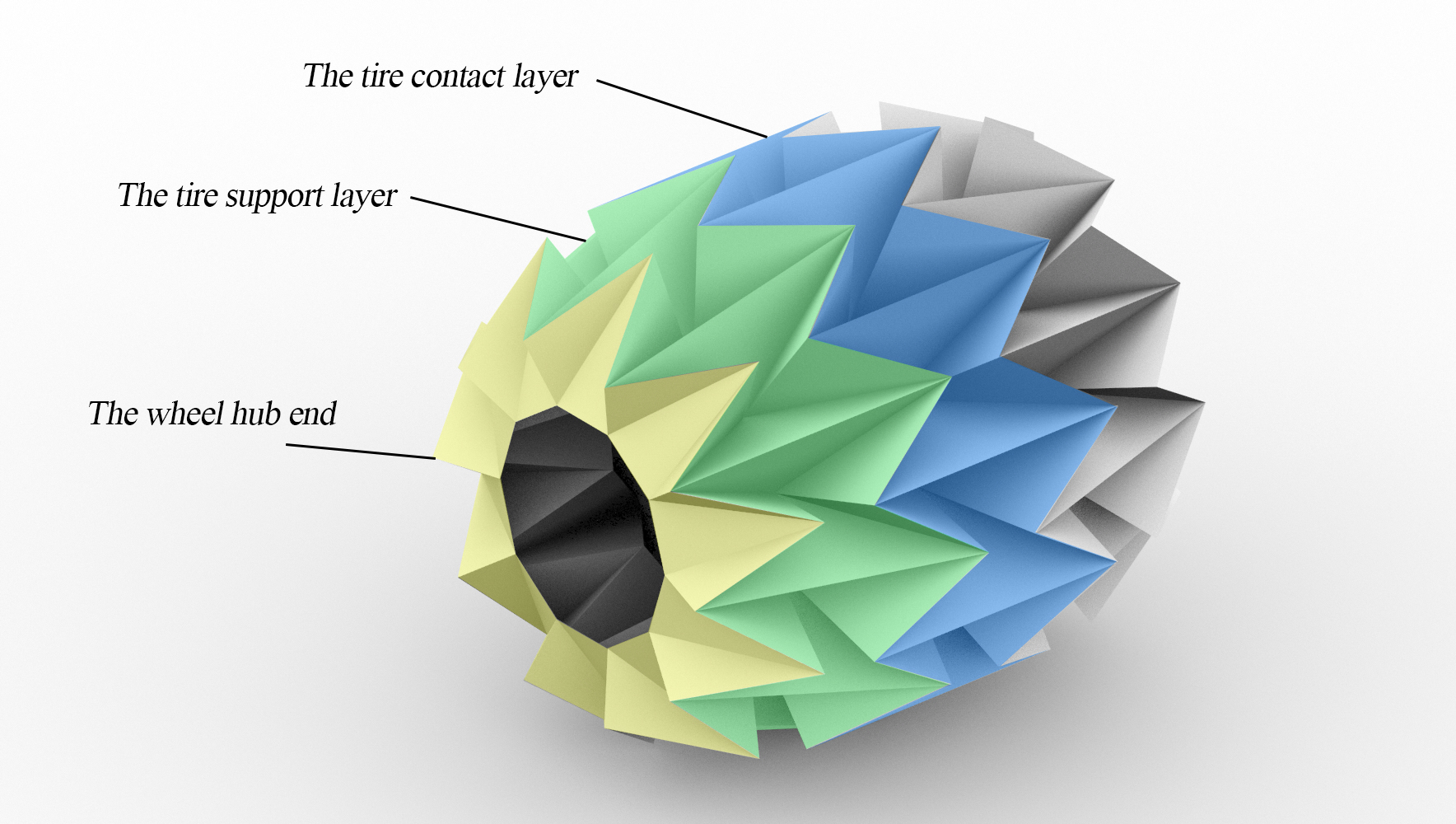 Appearance drawing of water-bomb wheel.
Appearance drawing of water-bomb wheel.
Structural design of deformation wheel and kinematics analysis of robot
The structural design of a deformation wheel and the kinematics analysis of a robot were crucial aspects for developing adaptable and efficient robotic systems. The researchers presented a comprehensive approach to address these challenges.
Firstly, they introduced the design of a water-bomb wheel and a multi-link support structure to enhance the wheel's strength and flexibility. Through kinematic analysis, the authors established the relationship between the wheel's geometry and its support structure, ensuring optimal performance.
Additionally, the authors proposed a novel approach to model the folding process of the wheel and validated it through simulations and experiments. They also discussed the parametric kinematics solution for the robot equipped with variable-diameter wheels, enabling accurate control and navigation. The integration of IMU data with odometry enhanced localization accuracy, crucial for autonomous navigation.
Robot SLAM mapping and autonomous navigation experiment
The experiments conducted in both virtual and laboratory environments demonstrated the effectiveness and accuracy of the proposed mapping and navigation approach for the robot. In the virtual environment, the mapping algorithm, incorporating parametric kinematic solutions and IMU-fused parametric odometry, successfully generated maps with high accuracy, as evidenced by the minimal mapping errors observed.
Furthermore, during the path planning experiment, the robot autonomously navigated to specified target locations, effectively avoiding obstacles and consistently choosing the shortest path. In the laboratory environment, a comparison between maps generated using traditional mapping algorithms and the proposed approach showed significant misalignment in the former, while the latter produced highly accurate maps.
Quantitative evaluation of landmark obstacles in the laboratory environment maps revealed small errors, indicating the superior accuracy achieved through the fusion of IMU information with parametric odometry and kinematic solutions. The autonomous navigation experiment in the laboratory environment further validated the effectiveness and accuracy of the proposed approach, as the robot successfully reached the specified target point. Overall, these experiments highlighted the robustness and reliability of the proposed mapping and navigation system, promising efficient and accurate robot operation in real-world scenarios.
Conclusion
In conclusion, the innovative recursive parameterized modeling method for water-bomb wheels, combined with a multi-link support structure, offered a promising solution for enhancing precision and reducing modeling workload in rescue robotics. The integration of IMU-fused odometry with parametric kinematic solutions enabled high-precision navigation, as demonstrated in both simulation and real environments.
The experiments conducted in virtual and laboratory settings validated the effectiveness and accuracy of the proposed approach, paving the way for advanced SLAM mapping and autonomous navigation in diverse and challenging terrains. Future research will focus on further refining 3D SLAM techniques and implementing autonomous obstacle avoidance strategies.
 Robots Learn To Detect Drinking Water With Machine Learning And Smart Decision-Making
Robots Learn To Detect Drinking Water With Machine Learning And Smart Decision-Making